
[21] PLC 중급 강좌
5. 위치 결정 유니트
5.1. 오픈 컬렉터 출력 모듈
5.1.5. 위치 결정 데이터
◈ 운전 패턴: 어떤 데이터 No.에 대응하는 위치 결정을 그 데이터에서만 완성시킬 것인지 또는 다음의 데이터 No.로 위치 결정을 속행할 것인지의 여부를 지정하는 것입니다.
① 위치 결정 종료: 지정 어드레스로의 위치 결정을 실행하고, 드웰타임 종료를 위치 결정 완료로 할 경우에 설정합니다.
② 연속 위치 결정: 1회의 기동 신호에 따라 데이터 No.순으로 연속해서 위치 결정을 실시합니다.(BUSY 신호는 위치 결정 속행 중에 ON합니다.)
③ 속도를 변경하여 연속 궤적 위치 결정: 1회의 기동 신호에 따라 데이터 No. 순으로 연속하여 위치 결정을 실행하지만, “위치 결정 도중에 속도 변경을 가능”으로 한 경우의 위치 결정 제어입니다.
◈ 제어 방식: 위치 결정 제어를 실행하는 경우의 “제어 방식”을 설정합니다.
① 제어 방식에서 “JUMP 명령”을 설정한 경우는 “드웰타임”, “M 코드”의 설정 내용이 다릅니다.
② 제어 방식에서 “LOOP”를 설정한 경우는 “M 코드”의 설정 내용이 다른 것과 다릅니다.
③ 단위 설정이 “degree”의 경우, 원호 보간 제어는 실행할 수 없습니다.(실행 시에 에러가 됩니다.)
1 : ABS 직선1= 1축의 직선 제어(ABS)
2 : INC 직선1= 1축의 직선 제어(INC)
3 : 치수 이송 1= 1축의 치수 이송 제어
4 : 정회전 속도1= 1축의 속도 제어(정회전)
5 : 역회전 속도1= 1축의 속도 제어(역회전)
6 : 정회전 속도ᆞ위치= 속도ᆞ위치 전환 제어(정회전)
7 : 역회전 속도ᆞ위치= 속도ᆞ위치 전환 제어(역회전)
8 : 정회전 위치ᆞ속도= 위치ᆞ속도 전환 제어(정회전)
9 : 역회전 위치ᆞ속도= 위치ᆞ속도 전환 제어(역회전)
A : ABS 직선2= 2축의 직선 보간 제어(ABS)
B : INC 직선2= 2축의 직선 보간 제어(INC)
C : 치수 이송 2= 2축의 직선 보간에 의한 치수 이송 제어
D : ABS 원호보= 보조점 지정 원호 보간 제어(ABS)
E : INC 원호보= 보조점 지정 원호 보간 제어(INC)
F : ABS 원호우= 중심점 지정 원호 보간 제어(ABS, CW)
G : ABS 원호좌= 중심점 지정 원호 보간 제어(ABS, CCW)
H : INC 원호우= 중심점 지정 원호 보간 제어(INC, CW)
I : INC 원호좌= 중심점 지정 원호 보간 제어(INC, CCW)
J : 정회전 속도2= 2축의 속도 제어(정회전)
K : 역회전 속도2= 2축의 속도 제어(역회전)
L : ABS 직선3= 3축의 직선 보간 제어(ABS)
M : INC 직선3= 3축의 직선 보간 제어(INC)
N : 치수 이송 3= 3축의 직선 보간에 의한 치수 이송 제어
O : 정회전 속도3= 3축의 속도 제어(정회전)
P : 역회전 속도3= 3축의 속도 제어(역회전)
Q : ABS 직선4= 4축의 직선 보간 제어(ABS)
R : INC 직선4= 4축의 직선 보간 제어(INC)
S : 치수 이송 4= 4축의 직선 보간에 의한 치수 이송 제어
T : 정회전 속도4= 4축의 속도 제어(정회전)
U : 역회전 속도4= 4축의 속도 제어(역회전)
V : NOP= NOP 명령
W : 현재값 변경= 현재값 변경
X : JUMP 명령= JUMP 명령
Y : LOOP= LOOP~LEND의 선두
Z : LEND= LOOP~LEND의 끝
◈ 보간 상대축: 2축 보간 운전을 실행할 경우에만 보간축(대상축)을 설정합니다. (3축/4축의 보간시는 자동적으로 결정되기 때문에 설정이 불필요합니다.) 보간 대상축에 설정 범위 1~4외의 값 또는 자축을 설정할 수 없습니다. 실행 시에 에러가 됩니다.
◈ 위치 결정 어드레스
① 앱솔루트(ABS) 방식: ABS 방식 및 현재값 변경 시의 위치 결정 어드레스(종점 어드레스)를 절대 어드레스(원점에서의 어드레스)로 설정합니다.
② 인클리멘트(INC) 방식: INC 방식시의 이동량(부호 있음)을 설정합니다. 이동 방향은 부호로 지정합니다.
이동량의 플러스의 경우: 플러스 방향(어드레스 증가 방향)
이동량이 마이너스의 경우: 마이너스 방향(어드레스 감소 방향)
③ 속도ᆞ위치 전환 제어시: 속도 제어에서 위치 제어로 전환한 다음의 이동량을 설정합니다.
④ 위치ᆞ속도 변환 제어시: 위치 제어시(속도 제어로 전환하기 전)의 이동량을 설정합니다.
◈ 원호 어드레스: 원호 어드레스는 원호 보간 제어를 실시할 경우에만 필요한 데이터입니다.
① 보조점 지정의 경우는 원호 보간을 실시할 경우의 보조점(통과점) 어드레스를 설정합니다.
② 중심점 지정의 경우는 원호 보간을 실시할 때 원호의 중심점 어드레스를 설정합니다.
◈ 지령 속도: 위치 결정 실행시의 지령 속도를 설정합니다.
① 설정한 지령 속도가 속도 제한값을 초과할 경우는 속도 제한값에서 위치 결정을 실시합니다.
② 지령 속도에 “-1”을 설정하면 카렌트 속도(이전의 위치 결정 속도와 동일 속도)를 사용하여 위치 결정을 제어합니다. 단, 위치 결정 기동시, 위치 결정 제어를 처음에 실시하는 위치 결정 데이터에 속도 “-1”이 설정되면, 속도 설정없이 에러가 되어 기동되지 않습니다.
◈ 드웰타임: 위치 결정에 필요한 펄스 출력을 완료했을 때부터 위치 결정 완료(BUSY 신호 OFF)까지의 시간을 말합니다.
① 드웰타임이 너무 짧으면, 위치 결정 정밀도에 영향을 미칩니다.
② 드웰타임은 위치 결정 펄스의 출력 완료에서 모터가 정지할 때까지의 시간보다 크게 설정하십시오.
③ 제어 방식이 “JUMP 명령”인 경우는 JUMP 상대의 위치 결정 데이터 No.를 설정합니다.
◈ M 코드: 위치 결정과 연동시켜서 각종 동작이나 표시 등을 하기 위한 번호입니다.
① M 코드를 출력하지 않는 경우는 “0”을 설정합니다.
② 제어 방식이 “JUMP 명령”일 때에 조건 성립에 따라 JUMP시키는 경우는 조건 데이터 No.1 ~ No.10을 설정합니다.
③ 제어 방식이 “LOOP”인 경우는 반복하여 횟수를 설정합니다.
5.1.6. 시퀀스 프로그램에 의한 1축 위치 결정 운전 [샘플 프로그램]
1) 샘플 프로그램의 위치 결정 시스템 계략

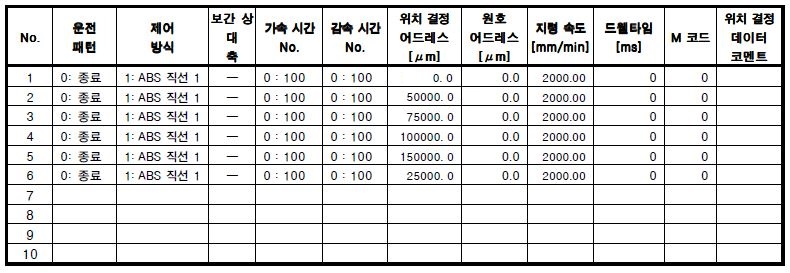
2) 위치결정 데이터

3) 위치결정 프로그램
① PLC READY
CPU의 READY 상태를 QD75에게 전달 합니다. READY 출력 조건에 필요에 따라 인터록을 거십시오. 이 프로그램은 반드시 작성하십시오.
② 에러 코드 표시와 에러 리세트
버퍼 메모리 “806”에서 읽은 1축의 에러 코드를 디지털 표시기에 BCD코드로 나타냅니다.
또, X50B(축1 에러 리셋 PB) 스위치에 의해 에러 리세트를 합니다.
③ 축1의 현재값 읽기
QD75가 출력된 펄스 수를 현재값으로 나타냅니다. 현재값의 표시는 X0(QD75준비 완료)를 입력 조건으로 합니다. 버퍼 메모리 “800”에서 읽은 축1의 현재값을 D100에 나타냅니다. 단위는 0.1㎛ 입니다.
④ 축1의 JOG 운전
X504가 ON 중 정회전 JOG, X505가 ON 중 역회전 JOG가 되도록 합니다. D102는 JOG 속도 설정값 입니다.
⑤ 축1의 원점 복귀
K9001의 기동번호로 기계적 원점복귀를 실시합니다. X500를 ON하면 원점 복귀를 시작합니다. (현재값은 0으로 된다.)

원점 복귀 기본 파라미터의 「원점 복귀 방법」은 0:근점 도그 방식이고, 「원점 복귀 리트라이」에 「리트라이를 실시한다」로 설정하기 때문에, DOG 중에 정지했을 때는 자동적으로 DOG의 바깥으로 나가 다시 원점 복귀의 동작을 실시합니다. 축1상태_원점 복귀 요구 플래그가 ON 되면, Y70 원점 복귀 요구 PL이 점등 됩니다.
⑥ 위치 결정 데이터의 기동
X502(축1 복귀지령 PB)를 ON하면 데이터 No.1(대기 포지션)을 직접 지정으로 기동합니다. X503(축1 위치결정 지령PB)을 ON하면 D104(위치결정선택No.)에서 설정한 위치 결정 데이터 No.를 D232에 간접 지정으로 기동합니다.
⑦ 동작 중의 정지
X501(축1 축 정지PB)을 ON하면 BUSY 중에 축 정지 시키는 Y4(축1 정지)를 ON하고, Y71(축 정지 PL)을 점등합니다. 동작 중의 정지는 외부 STOP 신호에 외부의 스위치를 배선하는 방법도 있으며, PLC CPU의 스캔 시간에 관계없이 신속하게 정지시킬 수 있습니다.
⑧ 정지 후의 재기동
데이터 No.1~No.6의 위치 결정 중에 정지 X501이 ON했을 때, X509(축1 재기동 지령 PB)의 스위치에 의해 지속 재기동을 실시합니다. 재기동 때는 버퍼 메모리의 1503(재기동 기동)에 “1”을 씁니다.
⑨ 위치 결정 동작 중의 속도 변경
BUSY 중에 속도를 변경할 수 있습니다. 축1의 버퍼 메모리 1514, 1515에 속도를 0.01mm/min의 단위로 씁니다. (속도를 0으로 하면 정지하는 것이 가능) 다음으로 속도 변경 요구 버퍼 메모리의 1516에 “1”을 쓰고, 속도 변경을 실행합니다.
⑩ 위치 결정 어드레스 변경
D20(변경 위치결정 데이터No.)의 지정과 D21(변경 위치값 mm)의 위치 결정 어드레스로 버퍼 메모리의 위치결정 어드레스를 변경 합니다. D21(변경 위치값 mm)은 1mm 단위로 지정 합니다.
⑪ 티칭 플레이백
JOG 운전(또는 수동 펄스 발생기)에서 등록한 위치로 이동하고, X507(축1 설정 데이터 등록) 스위치로 등록 조작을 실시합니다. 한번 등록했다면 기동 스위치로 등록 된 위치에 몇 회라도 위치 결정할 수 있도록 합니다.
⑫ 티칭 데이터 ROM 쓰기
티칭 후에 플래시 ROM으로 쓰는 경우에 작성합니다. M10(데이터 ROM쓰기 인터락)에 의해 Y0 (READY 출력 조건)에 인터록을 겁니다.
⑬ M 코드 처리
M코드는 축 별로 0~65535의 번호를 사용하여 위치 결정 데이터에 부가합니다. 「M코드 ON 신호 출력 타이밍」을 “WITH 모드[0]” 기동시의 검출인지 “AFTER 모드[1]” 완료시의 검출인지를 설정합니다. 샘플 프로그램에서는 “AFTER 모드[1]”로 운전 합니다. 시퀀스 프로그램 중에 M코드 검출 신호(X4)가 ON했다면 QD75의 버퍼 메모리에서 유효 코드(버퍼 메모리 808)를 읽고, M 코드 번호에 대응하는 시퀀스(작업)을 실행할 수 있습니다. 기동 완료시 M코드를 검출하고, M코드 OFF 요구를 합니다.
프로그램 예제 5.1_2
'MELSEC PLC 중급 강좌' 카테고리의 다른 글
| [23] PLC 중급 강좌 (0) | 2019.07.31 |
|---|---|
| [22] PLC 중급 강좌 (0) | 2019.07.24 |
| [20] PLC 중급 강좌 (9) | 2019.07.15 |
| [19] PLC 중급 강좌 (0) | 2019.07.11 |
| [18] PLC 중급 강좌 (0) | 2019.07.08 |




댓글