
[20] PLC 중급 강좌
5. 위치 결정 유니트
5.1. 오픈 컬렉터 출력 모듈
5.1.1. 개요
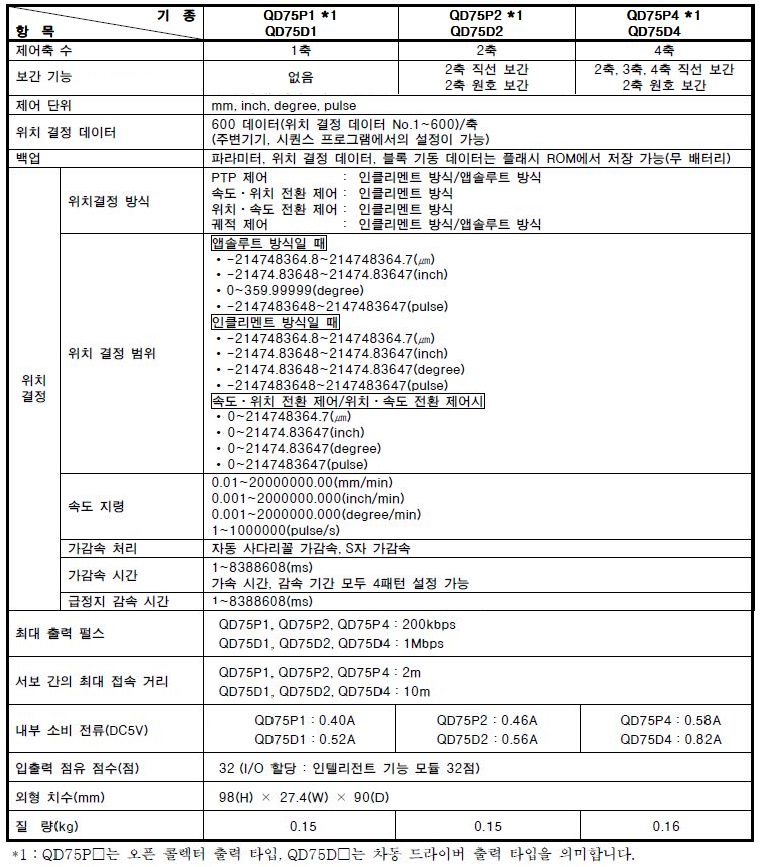
펄스 출력이 무엇인가에 따라서, 오픈 콜렉터 출력 타입인 QD75P1/QD75P2/QD75P4와 차동 드라이버 출력 타입인 QD75D1/QD75D2/QD75D4의 6종류가 있습니다.
QD75를 사용한 위치 결정 제어는「펄스 신호」를 이용합니다. QD75는 펄스를 발신 하는 모듈입니다. QD75를 사용한 위치 결정 시스템에서는 각종 신호나 파라미터, 위치 결정 데이터를 읽고, PLC CPU로 제어함으로써 복잡한 위치 결정 제어를 할 수 있습니다.
① 위치 결정 어드레스, 제어 방식, 운전 패턴 등을 설정할 수 있는 위치 결정 데이터는 축당 최대 600 데이터를 설정할 수 있습니다. 이 위치 결정 데이터는 모두 버퍼 메모리에 있으며, 자유롭게 읽기/쓰기할 수 있습니다.
② 축별 위치 결정에서는 직선 제어(4축 동시 실행 가능)를 할 수 있습니다. 이 제어는 하나의 위치 결정 데이터에 의한 단독 위치 결정 또는 복수 위치 결정 데이터의 연속 실행에 의한 연속 위치 결정을 할 수 있습니다.
③ 복수 축의 위치 결정에서는 2축~4축의 속도 제어, 2축~4축의 위치 제어에 의한 직선 보간 제어 및 2축에 의한 원호 보간 제어가 가능합니다. 이들 제어는 위치 결정 데이터 하나에 의한 단독 위치 결정, 또는 복수 데이터의 연속 실행에 의한 연속 위치 결정이 가능합니다.
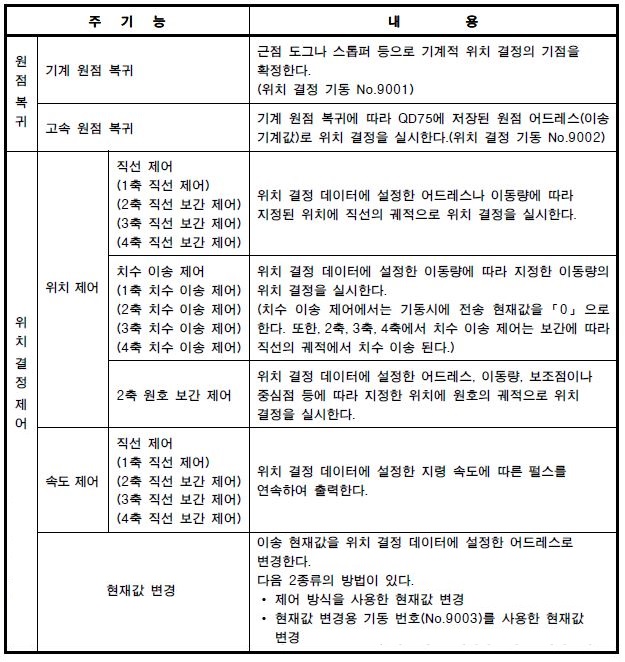
④ 각 위치 결정 데이터에서 지정한 제어 방식에는 위치 제어, 치수 이송 제어, 속도 제어, 속도ᆞ위치 전환 제어, 위치ᆞ속도 전환 제어 등이 있습니다.
⑤ 「기계 원점 복귀」의 원점 복귀 방식으로 근점 도그식 (1종류), 스톱퍼 정지식 (3종류), 카운트식 (2종류)의 6종류가 있습니다.
⑥ 임의의 위치에서 기계 원점으로 원점 복귀 제어를 실현하기 위해, 원점 복귀 리트라이 기능이 있습니다.
⑦ 가속도 방식으로 자동 사다리꼴 가감속과 S자 가감속의 2 종류가 있으며, 사용자가 선택할 수 있습니다. (스텝핑 모터 사용시, S자 가감속은 불가능합니다.)
5.1.2. 위치 결정 제어의 구조
1) 오픈 콜렉터 방식과 차동 드라이버 방식의 접속과 파형

◈ 오픈 콜렉터 방식
입력 파형을 부논리로 설정하였을 경우, 정전 펄스열, 역전 펄스열은 아래와 같습니다.
트랜지스터의 ON/OFF 관계와 파형은 SG를 기준으로 한 PP 및 NP의 전압 파형입니다. 최대 입력 펄스 주파수는 200Kbps이고, 서보간 최대 접속거리는 2m 입니다. 구조가 간단하고 간편하지만 입력 펄스 주파수가 작아 저속이며, 서보간 노이즈 및 접속거리가 짧습니다.


◈ 차동 드라이버 방식
입력 파형을 부논리로 설정하였을 경우, 정전 펄스열, 역전 펄스열은 아래와 같습니다.
포토커플러(Isolation Amplifier)의 ON/OFF 관계와 파형은 LG를 기준으로 한 PP, PG 및 NP, NG의 전압 파형입니다. 최대 입력 펄스 주파수는 1Mbps이고, 서보간 최대 접속거리는 10m 입니다. 포토커플러 앰프 구조로 비접촉 절연회로로 입력 펄스 주파수가 오픈 콜렉터 방식보다 커 비교적 고속 처리가 가능하며, 서보간 노이즈 및 접속거리가 비교적 좋습니다.

2) 위치 지령의 원리
지정한 거리를 이동하는데 필요한 총 펄스 수는 다음 식으로 구할 수 있습니다.
지정된 거리를 이동하는데 필요한 총 펄스 수 = 지정거리 / 모터가 1회전하는데 필요한 펄스 수 * 모터가 1회전했을 때의 기계(부하)측의 이동 거리
* 모터가 1회전하는데 필요한 펄스 수는 모터 사양에 기재된「엔코더의 분해능」입니다.
* 서보 앰프에 1펄스를 주었을 때의 기계측 이동량을「1펄스당 이동량」이라고하며, 이 값이 워크 작동의 최소값으로, 전기적인 위치 결정의 정밀도가 됩니다.
3) 속도 지령의 원리
속도 지령은 QD75에서 드라이브 모듈에 출력하는「펄스의 주파수」로 제어됩니다. 즉, QD75는「총 펄스 수」로 위치를, 「펄스 주파수」로 속도를 제어합니다.
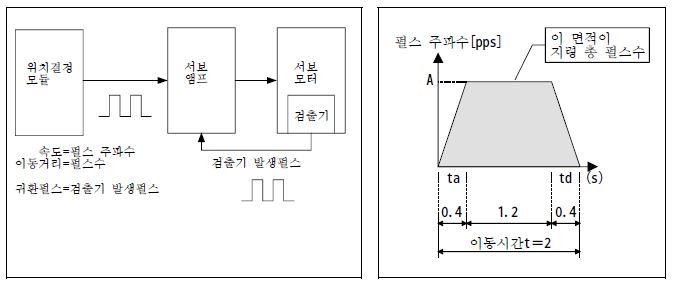
4) 위치 결정 시스템의 개략

① QD75 출력은 펄스 열입니다. QD75에서 펄스 열이 출력되면, 드라이브 모듈의 편차 카운터에는 입력된 펄스가 적산됩니다. 이 펄스의 적산값(드롭 펄스)이 D/A 변환기에 의해 직류 아날로그 전압이 되고 서보 모터의 속도 지령이 됩니다.
② 드라이브 모듈로 부터의 속도 지령으로 모터는 회전을 시작합니다. 모터가 회전하면 모터에 부속된 펄스 발생기(PG)에 의해 회전 수에 비례하는 피드백 펄스가 발생합니다. 발생한 피드백 펄스는 드라이브 모듈에 피드백되고, 편차 카운터의 드롭 펄스가 감산됩니다. 편차 카운트는 일정한 드롭량을 유지하여 모터의 회전을 지속합니다.
③ QD75로 부터의 지령 펄스 출력이 정지하면, 편차 카운터의 드롭 펄스가 감소하여 속도가 늦어지게 되고, 펄스가 0으로 되면 모터는 정지합니다. 즉, 모터의 회전 속도는 지령 펄스의 주파수에 비례하며, 모터의 회전 각도는 지령 펄스의 출력 펄스 수에 비례합니다. 따라서, 1 펄스당 이동량을 규정하면 펄스 열의 펄스 수에 비례하는 위치까지 전송할 수가 있습니다. 또한, 펄스 주파수는 모터의 회전수(이송 속도)가 됩니다.
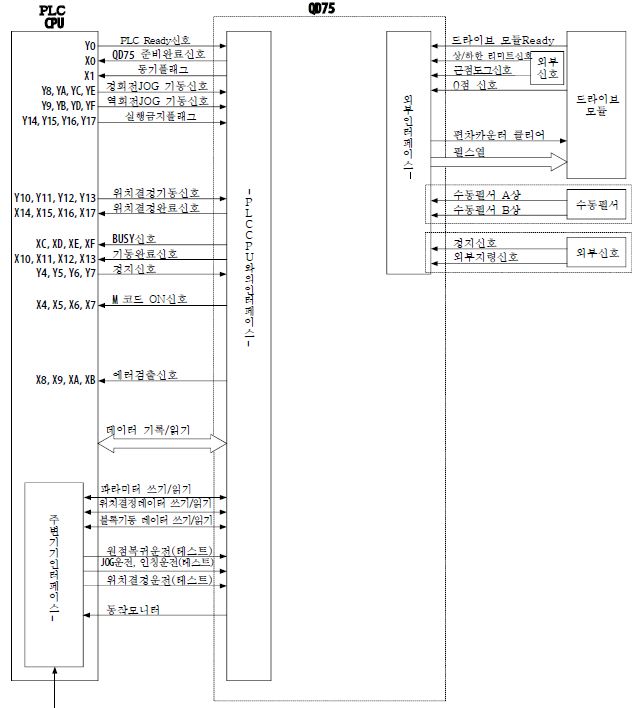
5) QD75와 각 모듈 간의 신호
QD75와 PLC CPU, 주변기기, 드라이브 모듈 등과의 신호 교환의 개략을 다음 그림에 나타내었습니다. (주변기기는 PLC CPU와 접속하고, PLC CPU를 경유하여 QD75와 신호 교환을 실행합니다.)
5.1.3. 위치 결정 모듈 사양ᆞ기능
1) 성능 사양
2) QD75의 주 기능


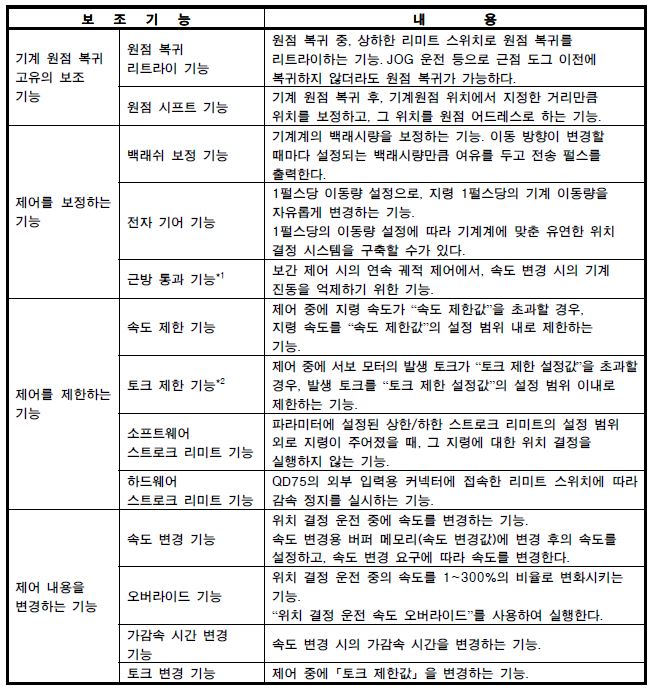
3) 보조 기능
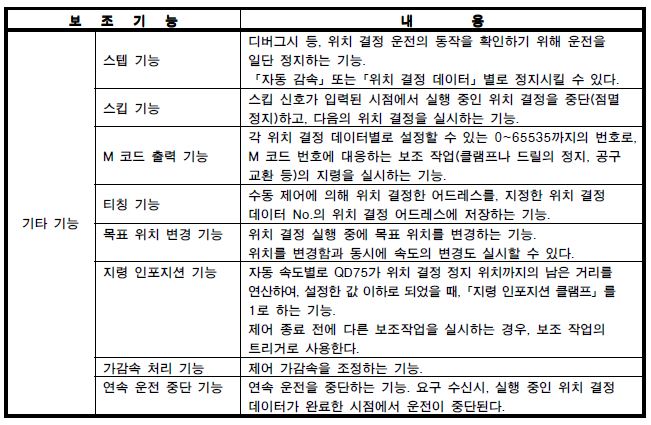
4) 기타 기능
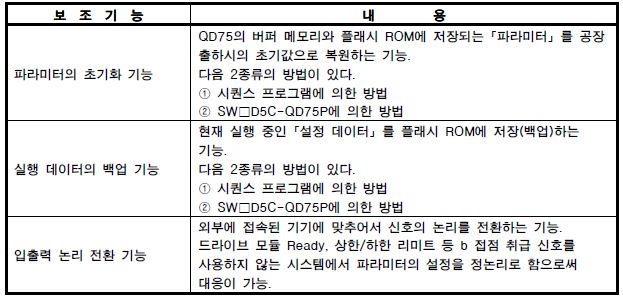
5) 공통 기능
6) 입출력 신호

5.1.4. 설정 데이터의 종류와 기능
1) 기본 파라미터
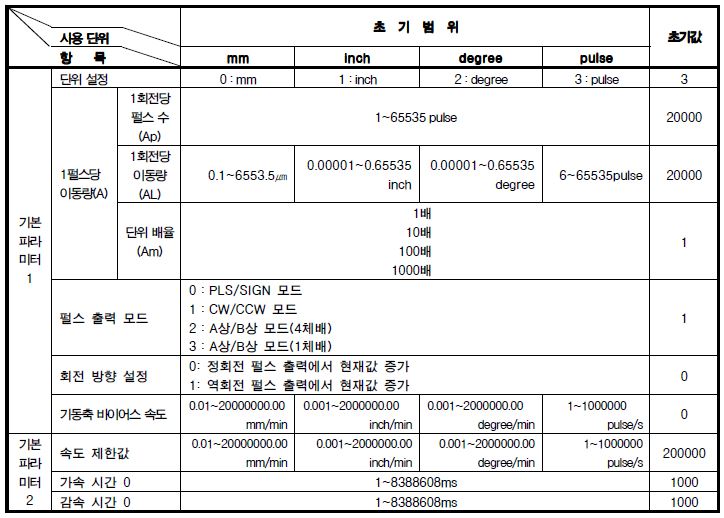
◈ 단위 설정: 위치 결정 제어시의 지령 단위를 설정하는 것으로 제어 대상에 따라 mm, inch, degree, pulse 중 하나를 선택합니다.
◈ 1펄스당 이동량: QD75에서 펄스열을 출력할 때의 1 펄스당 이동량을 설정합니다.
① 1회전당 펄스 수(AP): 펄스 발생기의 펄스 수(n)가 서보 앰프 MP-H나 MR-J2S에 피드백한다.
② 1회전당 이동량(AL): 모터 1회전으로 워크가 어느정도 이동하는지는 기계계의 구조로 결정됩니다.
③ 단위 배율(Am): 1 회전당의 이동량 설정 범위가 정해져 있으며, 이동량이 설정 범위보다 큰 경우에 배율을 올릴 수가 있습니다.
「1 회전당 이동량」과 「단위배율」의 설정 예.
<조건> 볼 나사의 리드가 10mm(10000㎛), 기어비는 1/1
<설정 예> 「1 회전당 이동량」의 설정 범위는 0.1~6553.5㎛이기 때문에 “1000.0”이라고 설정합니다.
• 「단위 배율」의 설정을 “10”으로 설정합니다.
• 서보 모터 HC-MFS의 피드백 펄스(1회전당 펄스 수는 131072펄스)가 QD75의 파라미터 설정 범위 65535 펄스를 초과하기 때문에 8192 펄스로 설정하고, 서보 앰프측의 전자 기어(Pr.4=CMX)에 16배하여, 131072펄스가 되도록 합니다.
◈ 펄스 출력 모드: 사용할 서보 앰프에 적합한 펄스의 출력 모드를 설정합니다.
① PLS/SIGN 모드
방향 부호(SIGN)의 ON/OFF로 정회전/역회전을 제어합니다.
• 방향 부호가 LOW인 경우는 정회전입니다.
• 방향 부호가 HIGH인 경우는 역회전입니다.
② CW/CCW 모드
정회전시에는 정회전용 필드 펄스(PULSE F)를 출력합니다.
또한 역회전시에는 역회전용 필드 펄스(PULSE R)를 출력합니다.
③ A상/B상 모드(4체배, 1체배 공통)
A상(AØ)과 B상(BØ)의 위상차에 따라 정회전/역회전을 제어합니다.
• B상이 A상에 비교해 90°지연될 경우는 정전합니다.
• B상이 A상에 비교해 90°앞설 경우는 역전합니다.
◈ 회전 방향 설정: 모터의 회전방향과 현재값 어드레스 증감의 관계를 설정합니다.
◈ 기동축 바이어스 속도: 기동시 바이어스 속도는 스텝핑 모터 등을 사용할 경우에 모터의 회전을 부드럽게 하기 위한 기동 최저 속도입니다.
◈ 속도 제한값: 구동 장치와 제어 대상에 따라 위치 결정시의 최고 속도를 설정합니다. 속도 제한값은 사용하는 모터의 최대 회전수 이하로 설정하고, QD75의 최대 출력 펄스 수(pulse/s)를 만족하도록 설정합니다.
◈ 가속 시간/감속 시간: 기동을 시작했을 때부터 기본 파라미터(2)에서 지정된 속도 제한값에 도달할 때까지의 시간을 설정합니다. 위치 결정 속도의 설정이 속도 제한값보다 작은 경우의 실제 가속 시간은 비례적으로 짧아집니다. 따라서, 위치 결정 속도의 최대값은 속도 제한값과 같게 하거나 가까운 값으로 하십시오.
2) 원점 복귀 파라미터
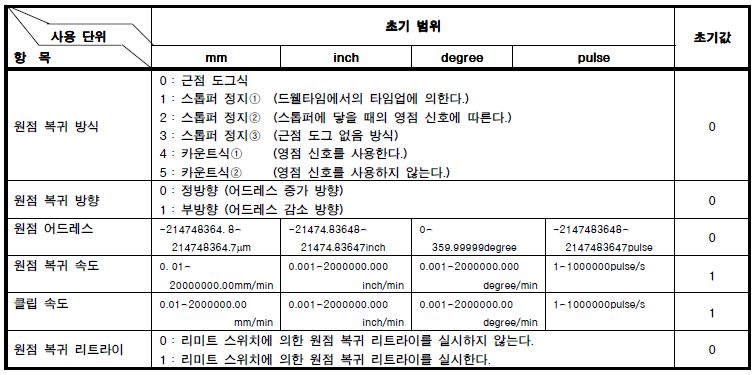
◈ 원점 복귀 방식: 원점 복귀 방법을 설정 합니다.
① 근점 도그식: 근점 도그식은 기계계에 부하가 걸리지 않고 정밀도도 좋지만, 근점 도그의 위치와 길이의 설정에 주의가 필요합니다.
② 스톱퍼 정지1 (드웰 타임에서의 타임업에 따른다.): 기계의 부담과 토크 제한 및 원점 복귀 드웰 타임의 설정에 주의가 필요합니다.
③ 스톱퍼 정지2 (스톱퍼에 닿을 때의 영점신호에 따른다.): 기계의 부담과 토크 제한의 설정에 주의가 필요합니다.
④ 스톱퍼 정지3 (근점 도그없음 방식): 기계의 부담과 토크 제한의 설정에 주의가 필요하지만, 근점 도그를 필요로 하지 않습니다.
⑤ 카운트식1 (영점 신호를 사용한다.): 기계의 부담을 주지 않고, 근점 도그식일수록 근점 도그의 위치와 길이의 설정에 주의할 필요가 없습니다.
⑥ 카운트식2 (영점 신호를 사용하지 않는다.): 기계의 부담을 주지 않고, 영점 신호를 필요로 하지 않지만, 정지 정밀도에 산포도가 있습니다.
◈ 원점 복귀 방향: 기계 원점 복귀를 기동할 때, 동작하기 시작하는 방향을 설정합니다.
◈ 원점 어드레스: 원점 복귀가 완료되고 정지하는 위치를 지정 어드레스로 변경하여, 앱솔루트 위치 결정의 기준값 입니다.
◈ 원점 복귀 속도: 원점 복귀시의 속도를 설정한다. 원점 복귀 속도는 다음의 범위에서 설정합니다.
속도 제한값 ≥ 원점 복귀 속도 ≥ 클리프 속도 ≥ 기동시 바이어스 속도
◈ 클리프 속도: 근점 도그 ON 후의 클리프 속도(원점 복귀 속도에서 감속한 정지 직전의 저속도)를 설정합니다. 클리프 속도는 다음의 범위에서 설정합니다.
원점 복귀 속도 ≥ 클리프 속도 ≥ 기동시 바이어스 속도
◈ 원점 복귀 리트라이: 원점 복귀 중, 상한 하한 리미트 스위치에 따라 원점 복귀를 리트라이하는 기능입니다. JOG 운전 등에서 근점 도그 이전에 복귀되지 않아도 원점 복귀가 가능합니다. 원점 복귀 리트라이 기능을 유효하게 설정하고 원점 복귀 기동을 실시하면, 원점 복귀 방향으로 이동을 실시하고, 근점 도그를 검출하기 전에 상한/하한 리미트 스위치가 OFF했을 경우는 감속 정지후, 원점 복귀 방향과는 반대로 이동합니다. 역방향으로 이동 중에 근점 도그 OFF를 검출하면 감속 정지하고, 다시 원점 복귀를 실시합니다.
프로그램 예제 5.1_1
예제 프로그램의 시스템 구성

'MELSEC PLC 중급 강좌' 카테고리의 다른 글
| [22] PLC 중급 강좌 (0) | 2019.07.24 |
|---|---|
| [21] PLC 중급 강좌 (1) | 2019.07.18 |
| [19] PLC 중급 강좌 (1) | 2019.07.11 |
| [18] PLC 중급 강좌 (0) | 2019.07.08 |
| [17] PLC 중급 강좌 (0) | 2019.07.01 |




댓글