반응형

서보 시스템 솔루션 샘플 프로그램[11]
Automated Guided Vehicle.
자동 주행 대차.
[시스템 구성]
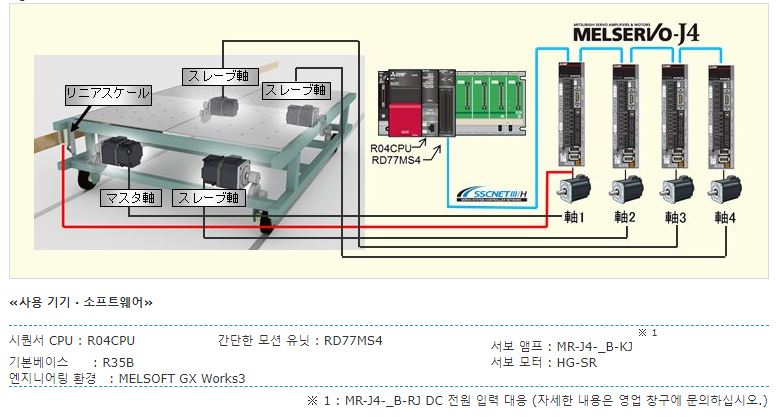
[동작 요약]
워크를 꺼낸 위치에서 워크의 목표 위치까지 반송합니다.
[제어 포인트]
Point1 : 풀 클로즈드 제어는 운전 중에는 서보 모터부, 정지시에는 기계부로 위치 제어를 전환하여, 서보 시스템의 위치정정 시간의 단축과 함께 구동부의 슬립 영향을 없앨 수 있습니다.

Point2 : 마스터 / 슬레이브 운전 기능을 사용하여 심플 모션에서 마스터 축의 위치 결정 제어뿐만 아니라 마스터 축이 자동으로 축 토크 값을 슬레이브 축으로 보내 사륜에 걸리는 토크의 분배를 균등하게 할 수 있습니다.

Axis 1: Master Axis
Axis 2: Slave Axis
Axis 3: Slave Axis
Axis 4: Slave Axis
[샘플 프로그램 구성]

[샘플 프로그램의 구성]
1. 첨부 파일.
2. 샘플 프로그램 설명서.
반응형
'PLC 프로그래밍' 카테고리의 다른 글
| 덴츠 DDK AFC-1500M 너트런너 통신 샘플 프로그램. (2) | 2019.05.13 |
|---|---|
| FX3U시리즈 Modbus 통신 샘플 프로그램. (0) | 2019.05.10 |
| 서보 시스템 솔루션 샘플 프로그램[10] (0) | 2019.04.14 |
| 서보 시스템 솔루션 샘플 프로그램[9] (0) | 2019.04.07 |
| 서보 시스템 솔루션 샘플 프로그램[8] (0) | 2019.03.28 |




댓글